Extended Reach Device
Introduction
Check out the project video here
Individuals restricted to a wheelchair have difficulty interacting with their surroundings and are limited by the length of their own arms. Reaching for objects when confined to a wheelchair can cause strain or result in injury. Extended reach devices, or grabbers, are commercially available but have cheap construction and lack the fine control to manipulate objects such as coins, keys, or household mechanisms.
The problem statement was developed: A device is required for an adult, restricted to a seated position, for the fine manipulation of lightweight objects in the home or office that can be operated by one arm/hand.
The goal was to design and prototype a reach deivce to assist individuals with interacting with their surroundings. Such objects would be door knobs or handles, buttons on electronic appliances, switches, pick up small objects from the floor on a table. The device should not prove to be more of a burden than commercially available devices (lightweight), should provide increase percision and accuracy, and improve the ergonomics of the device.
The Design
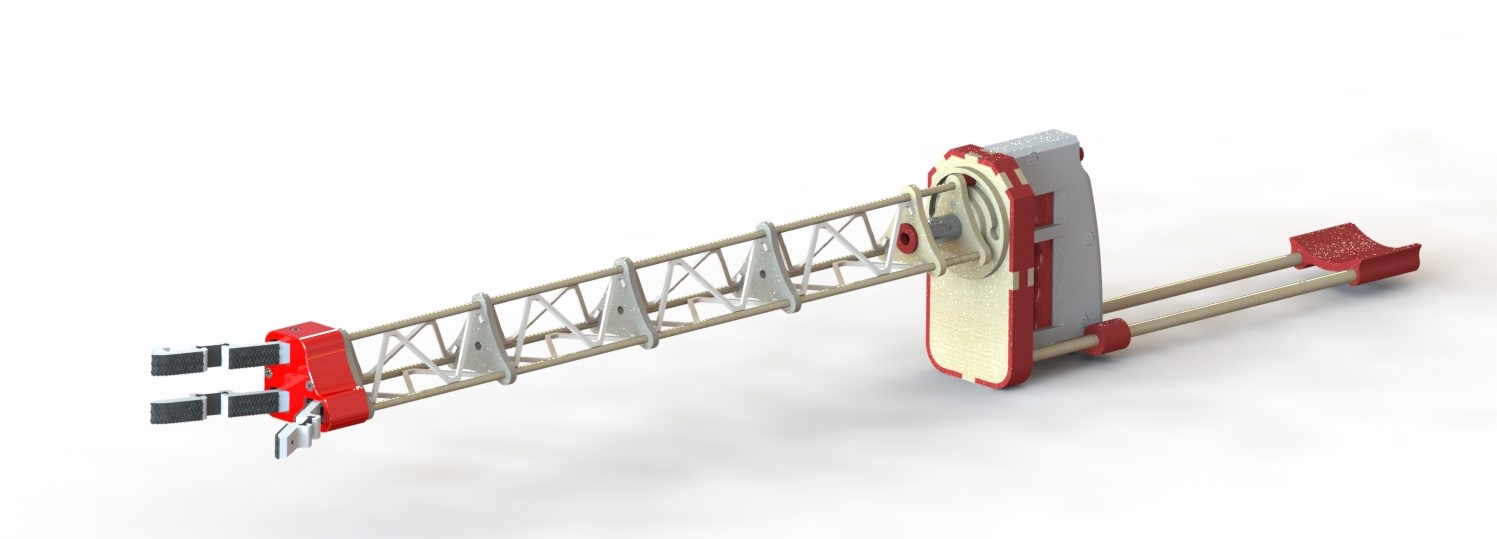
The CAD design of the Extended Reach Deivce can be seen below.
The three finger design is shown below. The fingers are lined with a "Ninja-flex" pad with a wave
texture to increase friction on objects. The knucles of the fingers are also made from "Ninja-flex" and
will return to their original shape when unloaded.

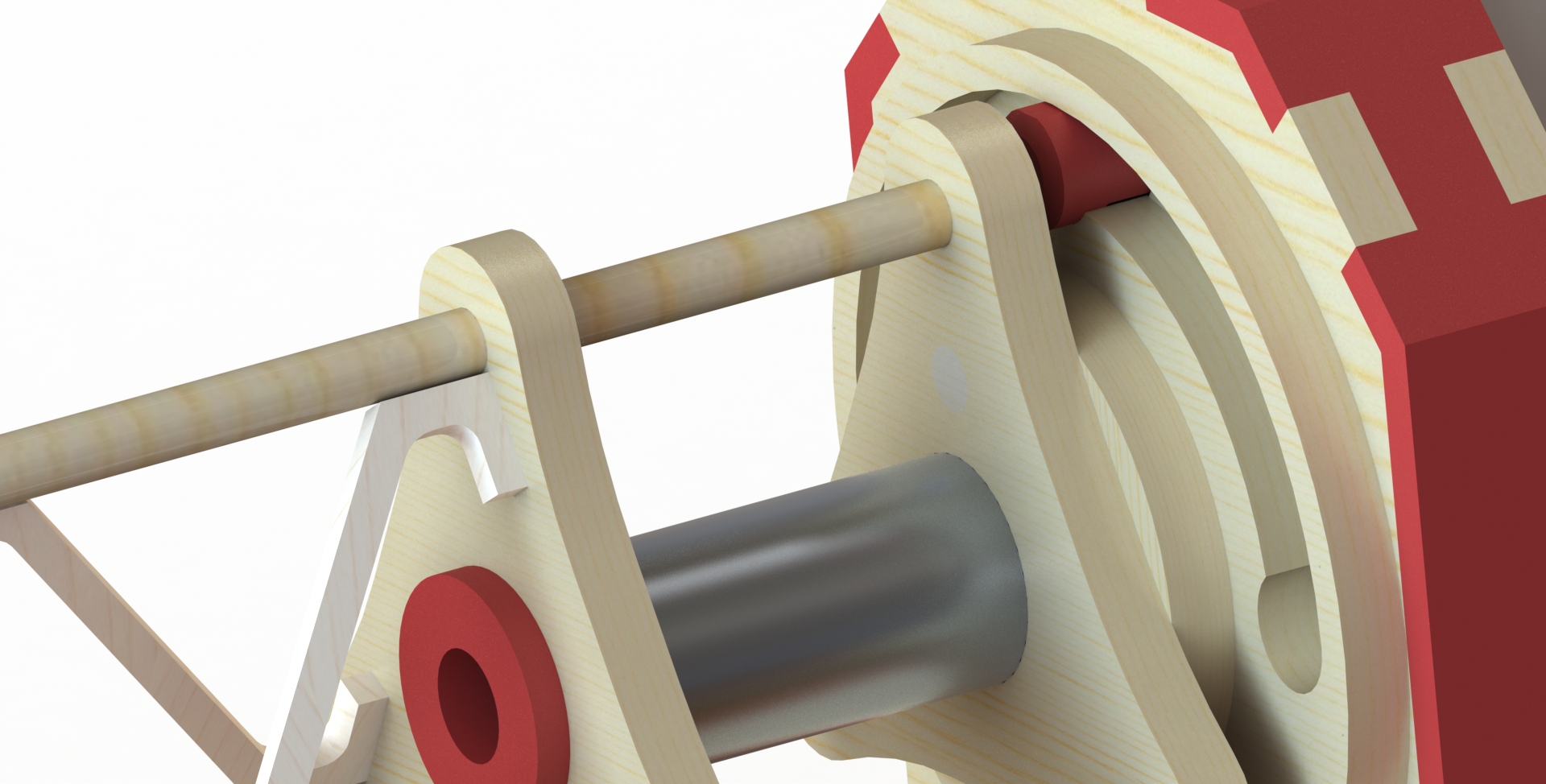
The spring loaded button to re-orientate the gripper +/- 90 degrees can be seen at the top left of the
device.
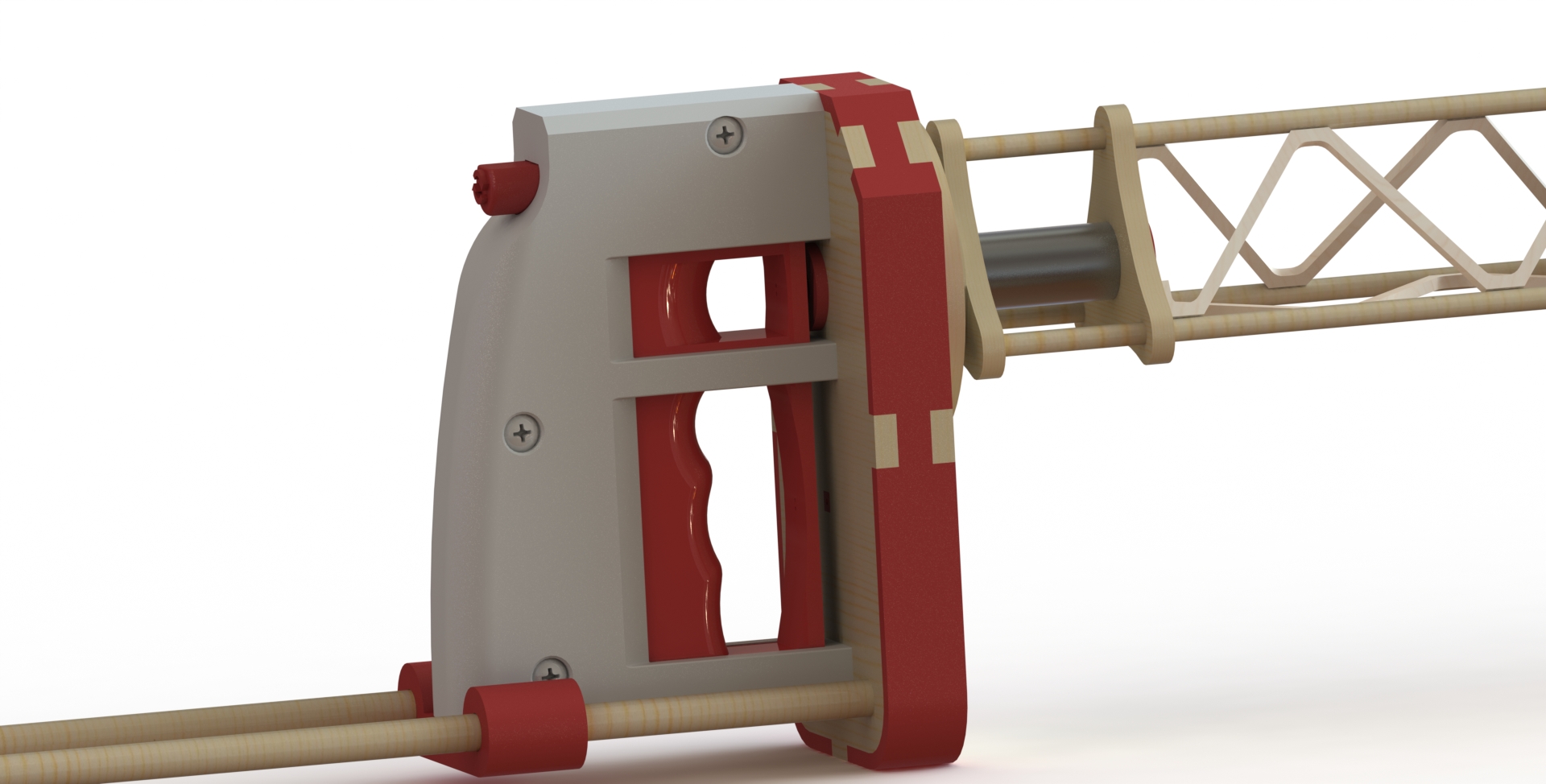
A closer look at how the re-orientation feature works. When the button is depressed, a groove in the
button shaft will allow the gripper to rotate. The gripper will lock on preset angles.
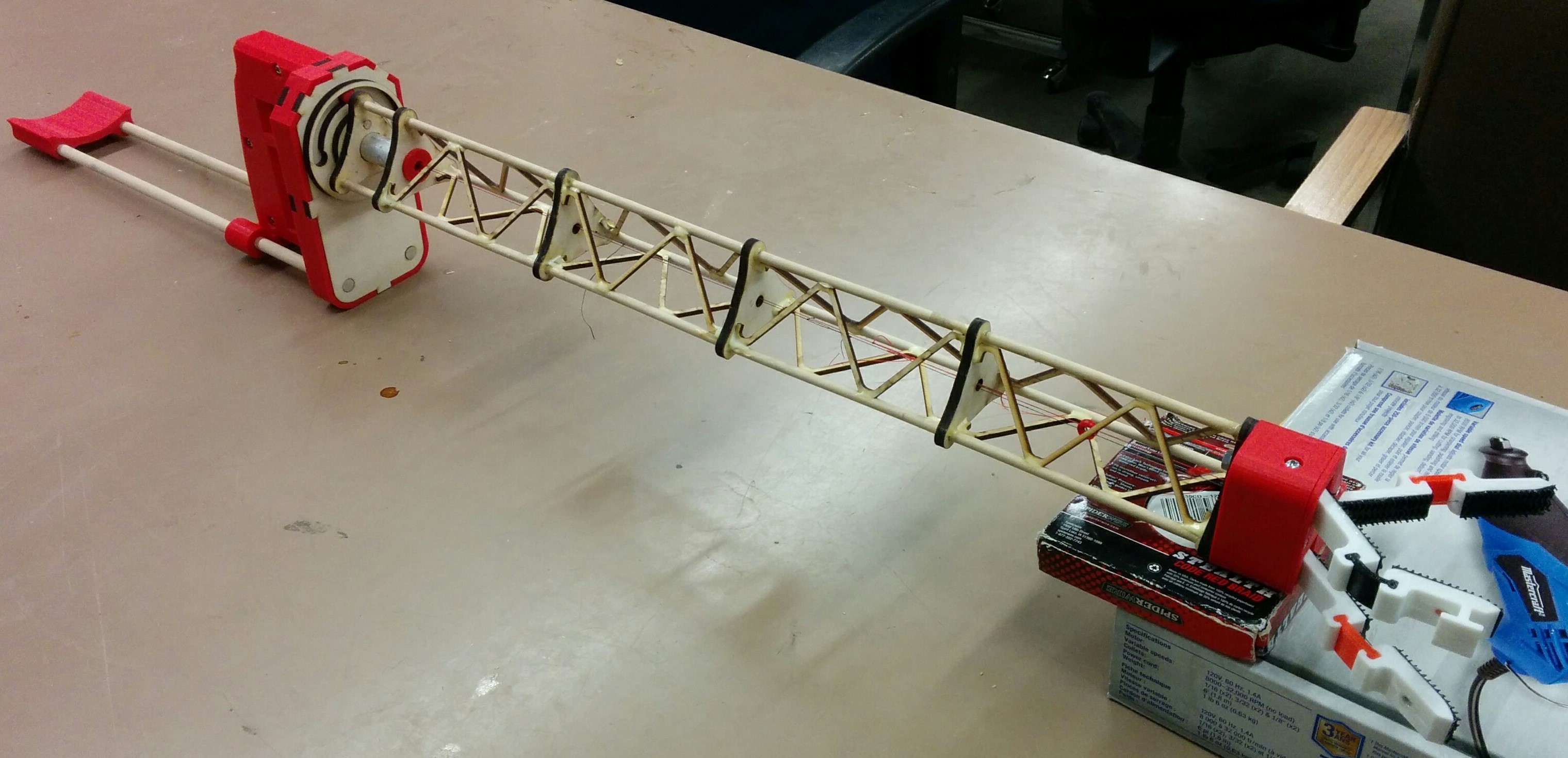
Prototyping
The design was prototyped using 3-D printers, laser cut plywood, and raw materials such as aluminum tube and wood dowels. The completed prototype can be seen below.
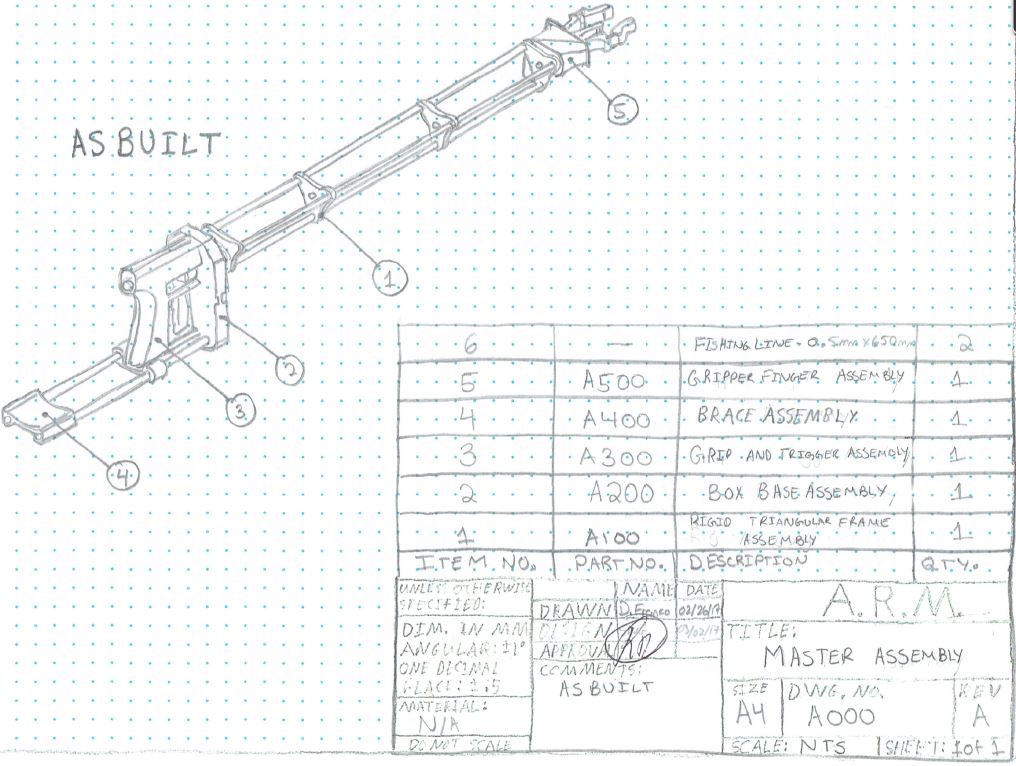
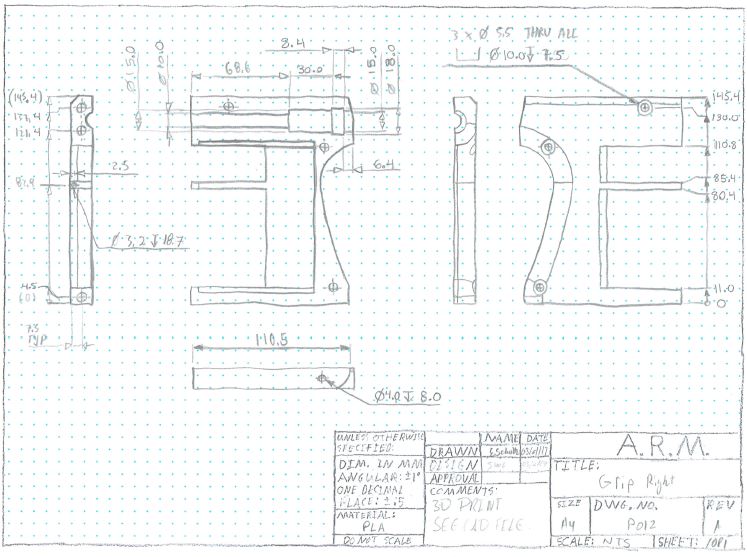
 A few cool hand drawings!
A few cool hand drawings!